


Le trimestre qui vient de s’écouler à l’IHP (de janvier à avril 2014) s’intitulait Marches aléatoires et géométrie asymptotique des groupes. Le titre fait penser aux probabilités (aléatoire vient du mot latin pour dé à jouer) et à la géométrie bien sûr, mais le lecteur assidu d’Images des Mathématiques aura sans doute deviné que l’algèbre a joué un rôle.
Marcher sur les dalles Commençons par expliquer le mot groupe. La figure ci-dessous rappelle un dallage en pavés autobloquants. Sauf que ce qu’on voit n’est qu’un échantillon d’un pavage infini. Intéressons nous aux translations qui préservent ce pavage, c’est-à-dire qui amènent chaque pavé sur un autre pavé.
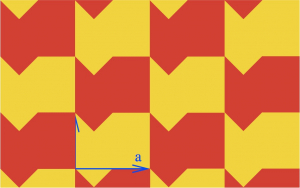
Pavés autobloquants
Dans une translation, tous les points se déplacent dans la même direction, de la même distance. Imaginez une armée infinie alignée sur le plan, avec un personnage placé sur chaque pavé. Si tous font simultanément un pas vers la droite, pour se retrouver sur le pavé contigu, il s’agit d’une translation, notée \(a\). Si tous font simultanément un pas vers la gauche, il s’agit à nouveau d’une translation, notée \(a^{-1}\). Pourquoi \(a^{-1}\) ? Parce que c’est le déplacement inverse. Si tout le monde fait un pas à droite puis un pas à gauche, tout le monde se retrouve à son point de départ. De même pour la translation \(b\) d’un pas vers l’avant, et la translation d’un pas vers l’arrière, notée \(b^{-1}\). On peut composer les translations. \(aa\) (noté \(a^2\)) consiste à faire 1 pas vers la droite, et à nouveau 1 pas vers la droite, soit 2 pas vers la droite. \(ba\) consiste à faire 1 pas vers la droite puis un pas vers l’avant. \(a^{-1}b^{-1}\) est le mouvement inverse : un pas en arrière puis un pas vers la gauche. L’inverse de \(a^2=aa\) est \(a^{-1}a^{-1}\), qu’on note \(a^{-2}\) (deux pas vers la gauche).
Voilà qui donne une idée de ce qu’est un groupe : un ensemble d’opérations, qu’on peut composer et inverser. Cela donne aussi une idée du rôle joué par cette notion : elle capture l’idée de symétrie. On appelle {symétrie} du pavage un déplacement du plan qui préserve le pavage 1Attention, le mot symétrie est employé ici dans un sens plus vaste que celui du collège. Au collège, on parle de symétrie axiale, ou de symétrie centrale. Ici, on considère qu’une translation peut être une symétrie d’un pavage.. L’ensemble des symétries du pavage est un groupe, le groupe des symétries du pavage. Évariste Galois a rencontré le premier la notion de groupe à travers les symétries 2Là encore, le sens du mot symétrie est détourné. Une symétrie d’une équation algébrique, c’est une opération algébrique qui en permute les racines. Ces symétries ne se voient pas toujours à l’œil nu. d’une équation algébrique, comme \(x^4-x^3+2x^2-2x+1=0\). C’est dire si l’idée en est universelle.
Un théorème sur un groupe Voici un théorème simple de théorie géométrique des groupes.
Chaque déplacement du plan qui préserve le pavage ci-dessus est une translation obtenue en composant suffisamment de fois les 4 opérations élémentaires \(a\), \(b\), \(a^{-1}\) et~ \(b^{-1}\). On trouve une infinité de translations distinctes, exactement une par pavé
Un pavage non euclidien

Pavage non euclidien
La figure ci-dessus montre un autre pavage plan, en géométrie non euclidienne cette fois. Expliquer la géométrie non euclidienne est une longue histoire, pour laquelle on renvoie au texte d’Étienne Ghys. Il y a une symétrie qu’on voit à l’œil nu, c’est la rotation de 90° autour du centre. Mais il y en a d’autres, moins visibles pour notre œil euclidien, mais qu’un œil non euclidien percevrait aussi facilement. Par exemple, il y a une sorte de rotation de 120° autour du point où 3 pieds de kangourous se touchent, et une autre autour du point où 3 queues de kangourous se touchent. De nouveau, par composition, ces trois opérations élémentaires fournissent toutes les symétries du pavage non euclidien, et il y en a exactement une par kangourou.
Marcher au hasard Marcher au hasard sur le pavage euclidien signifie partir d’un pavé, tirer au hasard celui des 4 pavés contigus sur lequel on va se déplacer (chacun ayant la même chance d’être choisi), et recommencer indéfiniment. Marcher au hasard sur le pavage non euclidien signifie partir d’un kangourou, tirer au hasard celui des 6 kangourous contigus sur lequel on va se déplacer (chacun ayant la même chance d’être choisi), et recommencer indéfiniment. A quoi bon ? Eh bien, il se trouve qu’on détecte ainsi une différence importante entre géométrie euclidienne et non euclidienne.
Un théorème sur les marches aléatoires La marche aléatoire euclidienne tend à revenir à son point de départ : avec probabilité 1 3c’est-à-dire 100% de chances.
, le marcheur repasse indéfiniment sur le pavé duquel il est parti. La marche aléatoire non euclidienne ne revient pas à son point de départ : avec probabilité 1, le marcheur se rapproche d’un point du bord du disque, là où les kangourous deviennent minuscules.
Géométrie asymptotique Le théorème précédent s’étend à tous les pavages euclidiens (resp. non euclidiens) : le mécanisme ne dépend pas de la forme du pavé, ni de ses symétries éventuelles (ce qui peut changer le groupe de symétrie du pavage). La différence détectée se situe à grande échelle, elle porte sur le comportement des lignes droites (plus courts chemins) sur de grandes distances, des aires de grandes régions, etc. C’est ce que signifie le terme asymptotique.
Si la théorie des groupes remonte à Abel et Galois, l’étude géométrique asymptotique des groupes est plus récente, elle débute dans les années 1960 et prend son plein développement à partir des années 1980, quand la classe des groupes hyperboliques fait son apparition. C’est la continuation naturelle de la démarche millénaire qui a conduit à la découverte des géométries non euclidiennes. De plus, c’est un ingrédient indispensable de la topologie. Enfin, c’est une source inépuisable d’exemples et de problèmes en théorie des probabilités. Cela justifiait de réunir à l’ IHP plus de 200 algébristes, géomètres, topologues et probabilistes du monde entier pendant trois mois.
A lire :
Un article joliment illustré sur la géométrie non euclidienne :
Le livre La symétrie ou les maths au clair de lune, de Marcus du Sautoy Editions Héloïse d’Ormesson, 2012
Post-scriptum
Je remercie Fluvial et Amel pour leurs critiques.
ÉCRIT PAR

Pierre Pansu
Professeur - Université Paris-Saclay
Il est possible d’utiliser des commandes LaTeX pour rédiger des commentaires — mais nous ne recommandons pas d’en abuser ! Les formules mathématiques doivent être composées avec les balises .
Par exemple, on pourra écrire que sont les deux solutions complexes de l’équation .
Si vous souhaitez ajouter une figure ou déposer un fichier ou pour toute autre question, merci de vous adresser au secrétariat.